Strona główna › Pytania ELM.06 › Pytanie 237
ELM.06 · pytanie #237
Prawidłowo strukturę kinematyczną PPO (TTR) urządzenia manipulacyjnego przedstawiono na
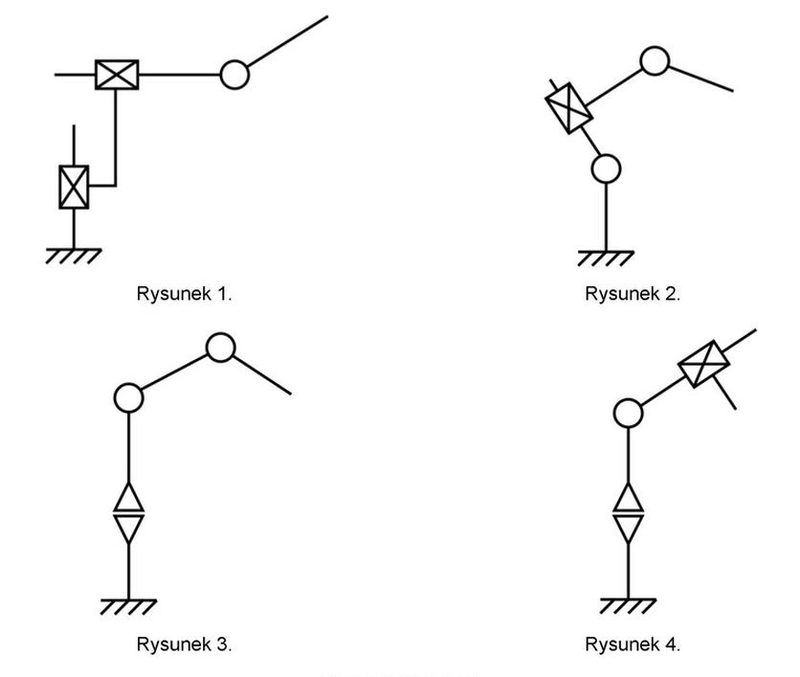
- Arysunku 2.
- Brysunku 1.
- Crysunku 4.
- Drysunku 3.
Poprawna odpowiedź: B. rysunku 1.
Kliknij odpowiedź, którą uważasz za poprawną.
Wyjaśnienie
Prawidłowa odpowiedź wskazuje na rysunek 1, który dokładnie ilustruje kinematyczną strukturę PPO (TTR) urządzenia manipulacyjnego. W tym przypadku rysunek przedstawia dwa przeguby obrotowe, które są reprezentowane przez okręgi, oraz jeden przegub liniowy, oznaczony kwadratem. Taka konfiguracja jest typowa dla urządzeń manipulacyjnych, w których przeguby obrotowe zapewniają ruch w wielu kierunkach, a przegub liniowy umożliwia ruch wzdłuż prostej linii. Zrozumienie tej struktury jest kluczowe dla inżynierów zajmujących się projektowaniem robotów oraz automatyzacji procesów. W praktyce, projektowanie urządzeń manipulacyjnych zgodnie z tym modelem pozwala na zwiększenie efektywności operacyjnej, co jest zgodne z najlepszymi praktykami w branży robotyki, gdzie każda z tych konfiguracji jest dostosowywana w oparciu o konkretne wymagania aplikacji. Dodatkowo, znajomość struktur kinematycznych pozwala na lepsze modelowanie ruchów, co jest istotne w programowaniu robotów oraz w symulacjach ruchu.
🤖 Wyjaśnienie generowane przez AI – weryfikuj w oficjalnych źródłach.