Strona główna › Pytania TLO.01 › Pytanie 96
TLO.01 · pytanie #96
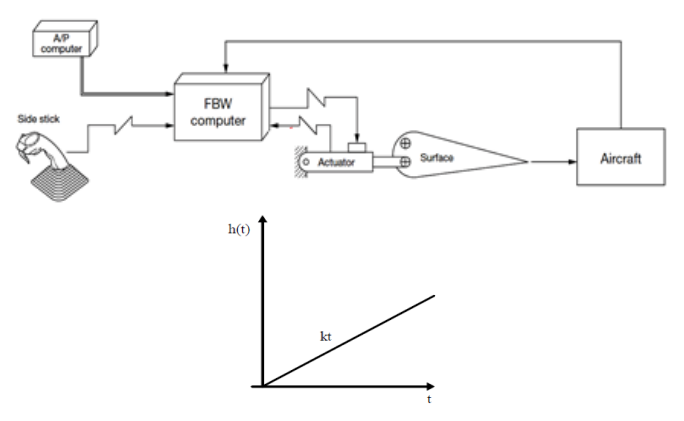
W przedstawionym na schemacie układzie sterowania fly-by-wire przetwarzanie sygnału sterującego przez człon dynamiczny o podanej charakterystyce skokowej h(t) realizowane jest w bloku opisanym jako
- AFBW computer.
- BA/P computer.
- CActuator.
- DSide stick.
Poprawna odpowiedź: A. FBW computer.
Kliknij odpowiedź, którą uważasz za poprawną.
Wyjaśnienie
Prawidłowo wskazany został blok FBW computer, bo to właśnie komputer fly‑by‑wire realizuje przetwarzanie sygnału sterującego według zadanego członu dynamicznego, czyli o określonej charakterystyce skokowej h(t). Na schemacie side stick i A/P computer są tylko źródłami sygnałów wejściowych (poleceń pilota albo autopilota), natomiast aktuator jest wykonawczym elementem napędzającym ster. Cała "inteligencja" układu – filtry, prawa sterowania, ograniczniki, sumatory, człony dynamiczne opisane równaniami różniczkowymi lub transmitancjami – siedzi w FBW computer. Można to skojarzyć z klasyczną teorią sterowania: charakterystyka skokowa h(t) opisuje odpowiedź członu na skok jednostkowy. W praktyce w samolocie to nie jest abstrakcja z podręcznika, tylko konkretne oprogramowanie w komputerze FBW, które implementuje np. człon całkujący, różniczkujący, filtry dolnoprzepustowe, kompensatory, prawa sterowania typu C* czy G‑command. Na wykresie masz h(t) rosnące liniowo (kt), co odpowiada idealnemu członowi całkującemu – i taki właśnie charakter działania można zrealizować cyfrowo w komputerze, a nie w dźwigni czy w siłowniku. W nowoczesnych samolotach (np. Airbus, niektóre Boeingi, samoloty wojskowe) komputery FBW zgodnie z dobrymi praktykami i normami (DO‑178C dla oprogramowania, DO‑254 dla sprzętu) są projektowane jako wielokanałowe, redundantne jednostki. Każdy kanał realizuje to samo prawo sterowania, czyli dokładnie te człony dynamiczne, których odpowiedzi opisuje się przez h(t). Dzięki temu komputer może kształtować odpowiedź samolotu na ruchy drążka: wygładzać sygnał, ograniczać prędkość wychyleń, kompensować nieliniowości i zapewniać stabilność oraz wymagane charakterystyki pilotażowe. Z mojego doświadczenia nauki tych systemów wynika, że kluczowe jest zapamiętanie: komputer FBW to miejsce, gdzie matematyka sterowania zamienia się w konkretne algorytmy działające na sygnałach, zanim trafią one do aktuatorów.
🤖 Wyjaśnienie generowane przez AI – weryfikuj w oficjalnych źródłach.